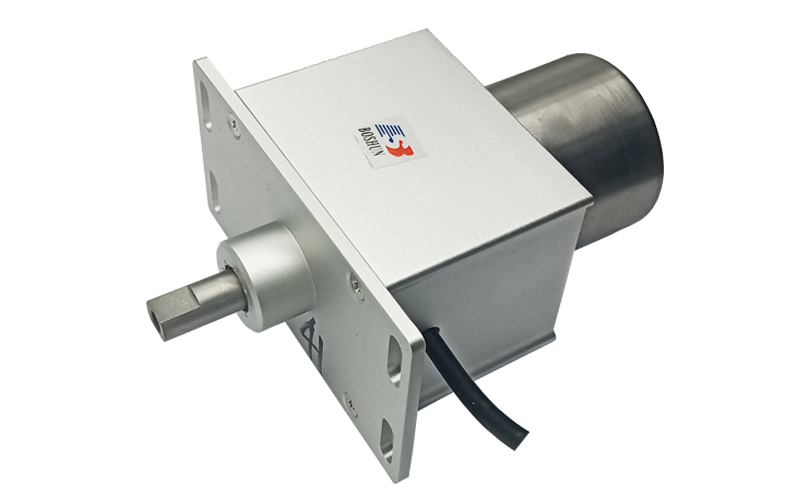
保持式電磁鐵

1.機器人電磁鐵所用機器人需要的感覺能力
①觸覺能力
觸覺是機器人電磁鐵實現與外界環境直接作用的必須媒介,是僅次于視覺的一種重要感知形式。 作為視覺的補充,觸覺能感知目標物體的表面性能和物理特性:柔軟性、硬度、彈性、粗糙度和導熱性等,觸覺能保證機器人電磁鐵所用機器人可開的抓住各種物體,也能使機器人獲得環境信息,識別物體形狀和表面的紋路,確定物體空間位置和姿態參數等。
檢測感知外部直接接觸而產生的接觸覺、壓覺、滑覺等傳感器稱為機器人觸覺傳感器。1)接觸覺傳感器;2)壓覺傳感器;3)滑覺傳感器。
②力覺能力
力覺傳感器是機器人電磁鐵所用機器人最基本,最重要的一種,也是發展較成熟的傳感器。沒有力傳感器,機器人就不能獲取它與外界環境之間的相互作用力,從而難以完成機器人在環境約束下的各種作業。
③接近覺能力
接近覺傳感器是機器人電磁鐵所用機器人用來控制自身與周圍物體之間的相對位置或距離的傳感器,用來探測在一定距離范圍內是否有物體接近,物體的接近距離和對象的表面形狀及傾斜等狀態,它一般都裝在機器人電磁鐵所用機器人的手部,起兩個方面的作用。接近覺一般用非接觸式測量元件,如霍爾效應傳感器,電磁式接近開關,光學接近傳感器和超聲波式。
④視覺能力
→視覺信息可分為圖形信息,立體信息,空間信息和運動信息;
→視覺傳感器獲取的信息量要比其他傳感器獲取的信息量多得多;
→視覺傳感器把光學圖像轉換為電信號;
→視覺傳感器攝取的圖像經空間采樣和模數轉換后變成一個灰度矩陣,送入計算機儲存器中,形成數字圖像。
機器人電磁鐵BS-32100X-01是由東莞博順電磁鐵廠家研發設計并生產的一款電磁鐵,此機器人電磁鐵用在機器人上,具有結構可改,參數可調優點。